Q

Reflex-Tufts IDEA Lab(on-going)
Reflex is a group project in IDEA Lab at Tufts University. IDEA Lab is an adventurous research group involved in projects related to virtual reality development, machine learning, UX/UI design, human factors, industrial design and so on, open to students of Tufts Engineering School.
ReFlex addresses the muscle coordination challenges faced by stroke survivors, aiming to revolutionize assistive devices for rehabilitation.Traditional m
Project Summary
Team Member
Project leader: Riya, Bence, Paola
Project members: Qian Li, Ivy, Chris, Joey, Cornor
Timeline
2024.3-present
My role
UX research
Prototyping
Project Background
-
795,000 strokes per year in the U.S., with many survivors facing long-term arm mobility issues.
-
Current stage: transitioning from design to prototyping, testing materials for optimal function.
-
Stroke rehabilitation is often rushed, expensive and potentially controversial
-
The physical therapy community is frequently divided between finding workarounds or return to pre-stroke behavior
-
Current scope of rehabilitation focuses on walking and gait- This usually leads to the use of a walker, cane, or brace
Problem Statement
Stroke survivors often struggle with upper limb mobility, especially in the elbow joint, which is crucial for everyday tasks like eating and dressing. Traditional at-home therapy faces low adherence, leading to minimal progress and reduced motivation. ReFlex aims to tackle this by creating an engaging rehabilitation experience and maintaining consistent calibration across various adjustment levels.
Project Goal
We at ReFlex, are developing an innovative adjustable wearable device to assist stroke survivors in limb extension, particularly the arm, through a unique bi-stable spring mechanism. The device should detect the wearer’s initial intent to move and amplify that effort, promoting a full range of motion. Beyond physical assistance, the project aims to enhance confidence, independence, and encourage rehabilitation for individuals who have experienced a stroke. This cutting-edge project is currently transitioning from the initial design phase to hands-on prototyping.
Current Landscape

Product Ideation: Forearm Wiring
What We Know:
Stroke survivors struggle more with elbow flexion than extension due to spasticity causing muscles to contract
That means we need to either push on the top of the forearm or pull on the bottom of the forearm
Cables and strings are solely tensile devices - you can’t push a string (and have it impart any force)
Therefore we can’t use strings to directly connect to the top of the forearm - the most convenient method

Rather than a pulley system a system similar to this may be a better design
(Not completely relying on the string, both flexion and extension). Wires
could be passed through the steel bars.
Other Method: Compression Sleeves
Securely attaches to arm. Could make a velcro version we attach
all the necessary devices to. We can then stitch the wires into the
sleeve to keep them hidden and protected (would be useful if we
decided to go with a pulley system

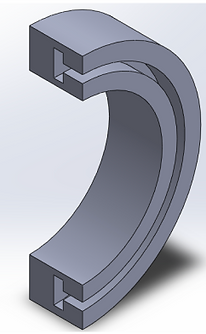
Bracelet Idea:
If cables with ends fit in the slots of the bracelet, then the cable will be able to always maintain the proper straight-line from the spool to the arm regardless of rotation in the forearm. This could be attached so something like the dynasplint padding shown above so it wouldn’t need to necessarily fit perfectly to the arm.
A partial bracelet would likely be used so the device can be taken on and off witha velcro strap.
If we find a way to mount the spool below the elbow then this would allow for elbow extension, then slack could be reduced and we could take advantage of spasticity to aid in the elbow flexion
Breakthrough Vision
Accessible Arm Rehabilitation Using Negative Viscosity at the Elbow Joint

Design Requirements
Usability: Self-applicable, intuitive controls, modular, and adjustable (strap, forearm, upper arm).
Comfort & Safety: Gentle on skin, enclosed mechanism, durable, with max force limit of 15N. Fits the 95th and 5th percentile
Affordability: Cost-effective and accessible.
Motivational Feedback: Progress tracking and adjustable assistance dial.
Independence: Easy for users with limited mobility to put on alone.
Brainstorming



Brainstorming session to fuel a researched debate of our direction for the semester.
Biomechanics problem using torque to analyze muscle force on the elbow joint.

Task Analysis

Ergonomic Measurement Research





Hypothesis for a Force Function
Goal: Create a modular function that can be used to map user input into device output
Ideal Characteristics:
Continuous: Our brains work by associating behaviors with consequences (operant learning). If we have spikes in our function, the brain won’t be able to process that as well
It could also lead to physical injury as our brains wouldn’t be fully in control of the arm movement
Opportunities for learning: The function exhibits various slopes allowing for different phases of learning
Zero Region: Have a region where the user does not receive assistance until they put in a certain amount of effort
Linear Region: Once enough force is applied, help them move their arm freely by supporting a certain percentage of the force
Flattening: Have a region where less and less relative assistance is being provided so training can occur
Safety cap: Have a strict maximum on the amount of force the device applies
The solution: arctangent

Parameters of the function:
Amplitude: The range between the min and max
Safety Cap (ASC): Maximum value
Spread: Affects how long the increase is spread over
Increasing spread decreases the assistance given
Will very likely be a value between 0 and 1
Offset: Affects how much force is needed for assistance to begin
The equation: f(x) = Amp/(pi) * [arctan(spread * x - offset) - pi/2] + ASC
Design & Prototyping
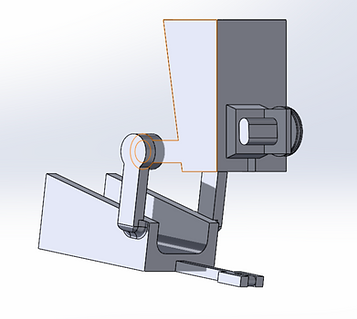








Take aways
Completed: Growth in team, chose mechanism of negative Viscosity at the Elbow Joint for device, developed SolidWorks assembly of Prototype
Current: Understanding universal design, conducting empirical study to maintain device calibration at all modularities of adjustment
Next Step
Assemble and verify that the prototype adheres to the Usability Requirements as well as the Design specifications we have set.
Our team



